1997年5月5日,海军医院神经外科病房实施了我国第一台机器人手术,由海军总医院与北京航空航天大学机器人研究所共同研制成功的第一台医用机器人,在两名医生和一名计算机专家的共同指令下首次完成立体定向颅咽管瘤内放射治疗术,从而掀开我国医用外科机器人应用新的一页。
海军总医院在我国率先开展了脑部的立体定向手术,具体操作一直是由医生亲手进行的。而启用机器人替代医生手工操作的原因,该医院神外中心医生认为是基于四个考虑:一是机器人定位更加精确,减少人为误差;二是可以代替医务人员进行有损害的操作,如注入放射性同位素;三是机器人定位时间短、定位精、创伤小;四是机器人可以预模拟手术操作、选择最佳入路手术方案等。
机器人辅助手术的结果也非常理想。该病患儿童患颅咽管瘤全麻开颅手术后三年复发,瘤体达3×3×2.5厘米。而此次手术过程仅用45分钟。病人走出手术室,头痛、高颅压同时即缓解,视力恢复正常。两个小时后即进食了牛奶,没有任何并发症。
传统的外科手术是医生用医疗器械对病人的身体病灶进行切除、缝合等治疗。用刀、剪、针等器械在人体局部进行操作,除去病变组织、修复损伤、移植器官、改善机能和形态等。在一些手术中,患者需要承受巨大的痛苦,比如长达十几厘米的伤口、肌肉全部被切断等。切口大意味着伤重、出血多、感染风险高。而减少患者痛苦、提高手术精确度、降低手术风险是手术机器人出现的最重要目的。

历史上重要的手术机器人诞生时间
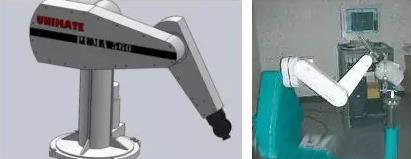
国外在手术机器人的发展非常早,第一台手术机器人的应用可以追溯到1985年。美国洛杉矶医院的医生使用Puma 560完成了机器人辅助定位的神经外科脑部活检手术。但是实际上,Puma 560并不是一台专用的手术机器人,它其实是一台关节式的臂式工业机器人。这是首次将机器人技术运用于医疗外科手术中,是一个具有划时代意义的开端。但是当时生产该机器人的公司为了安全考虑,曾禁止使用该机器人被用于手术。

而专门用于外科手术的医疗机器人在90年代初诞生了,ROBODOC就是其中的代表。1986年,美国IBM的Thomas J. Watson研究中心和加利福利亚大学合作开发,并于1992年成立了Integrated Surgical Systems公司,推出第一个被FDA通过的手术机器人——ROBODOC。该机器人可完成全髋骨替换、髋骨置换及修复和膝关节置换等手术,髋关节置换过程中,它对股骨的调整精确度达到96%,而医生的手工精确度只有75%。
最早走上商业化道路的手术机器人——AESOP(伊索)

真正走向商业化道路的手术机器人,是由美国Computer Motion公司研开始研发的伊索系列机器人——一种可由手术医师声控的“扶镜”机械手,以避免由于扶镜手生理疲劳所造成的镜头不稳定。
20世纪80年代初,被誉为手术机器人之父的王友仑从加州大学圣芭芭拉分校(UCSB)计算机工程专业本科兼研究生毕业,那时候的他正在思考自己攻读博士的方向。因为王友仑从小就十分迷恋机器人,认为机器人是未来发展的方向,是计算机与物理世界进行交互的方式。因此,他决定攻读 UCSB 的计算机工程(机器人方向)博士学位。
之后,他便开始研究二十世纪八九十年代的机器人市场。有幸获得NASA的资助,开始利用这些资源来观察不同行业的机器人需求。王友仑在和医生交谈中,了解到了腹腔镜微创手术。在90年代初,这个行业还处于起飞阶段。在微创手术中,医生通过内窥镜等设备在病人体内开展治疗,在电视屏幕上就可以看到病理构造,这项技术极大地提高了外科手术的成功率。微创手术成为Computer Motion 公司的主题。王友仑在 1989 年开始研究“伊索”(AESOP,自动最优定位内窥镜系统),并于 1997 年研制成功。
该机器人可以模仿人手臂功能,实现声控设置,取消了对辅助人员手动控制内窥镜的需要,提供比人为控制更精确一致的镜头运动,为医生提供直接、稳定的视野。1997年,伊索在比利时布鲁塞尔完成了第一例腹腔镜手术。伊索成为FDA批准的第一个清创手术机器人,直到2014年,外科医生应用伊索已在全球做了超过7.5万例次微创手术。

到1998年,伊索配备了腹腔镜,逐渐进化成了宙斯。它可以遥控操作,是一个完整的手术器械机器人系统。宙斯分为Surgeon-side系统和Patient-side系统。Surgeon-side系统由一对主手和监视器构成,医生可以坐着操控主手手柄,并通过控制台上的显示器观看由内窥镜拍摄的患者体内情况。
Patient-side由用于定位的两个机器人手臂和一个控制内窥镜位置的机器人手臂组成。医生可以声控操作腹腔镜的手臂,同时用手操作其它两个机械手臂进行手术。宙斯在一台输卵管重建手术中就已初现微创优势,通过患者腹部只有几个筷子粗细的小切口供内窥镜和机械臂出入。

2001年9月7日,身在纽约的著名外科学家雅克·马雷斯科和美国纽约的著名外科医生米歇尔博士在两地协同合作,利用宙斯系统完成了对身在法国斯特拉斯堡的68岁女患者的胆囊摘除手术。整台手术耗时仅48分钟,患者术后48小时内恢复排液,无并发症出现。马雷斯科教授认为,这是外科史上继微创技术及电脑辅助应用后的第三次变革,成功引入“全球外科技术共享”理念,无论医生在何处,都能参与任何地方的手术。
这台具有开创性特质的手术被成为“林德伯格手术”。虽然手术成功完成,但是影像的传输和手术操作却出现了延迟的现象,这使得远程手术难以实现。然而,随着网速的增长,现代远程手术的延迟现象毫无疑问会得到改善。

达芬奇手术机器人是目前全球最成功及应用最广泛的手术机器人。它由Intuitive Surgical公司1999年研制成功,目前已推出四代产品。达芬奇代表着当今手术机器人最高水平,它主要由三部分构成:医生控制系统,三维成像视频影像平台,以及拥有机械臂,摄像臂和手术器械组成移动平台。实施手术时,主刀医师不与病人直接接触,通过三维视觉系统和动作定标系统操作控制,由机械臂以及手术器械模拟完成医生的技术动作和手术操作。
除了宙斯,当时技术上几乎并驾齐驱的各个手术机器人都得到过很好的运用。伊索曾有过每年完成数万例手术的辉煌,ROBODOC也曾被北美、欧洲,亚洲、大洋洲的多个国家和地区应用。2000年,达芬奇正式获得FDA的认证,成为第一台FDA认证的内窥镜手术机器人。虽然伊索和宙斯更早进入市场,不过,因其产品一直没有获得FDA认可,所以迟迟没有打开市场。2003年专利纠纷后,宙斯所属的Computer Motion公司和达芬奇所在公司Intuitive Surgical的合并,达芬奇成为市场上唯一得到FDA认证的外科手术机器人产品,几乎垄断了全球手术机器人市场,这种状况延续至今。
功能更为强大的达芬奇,不仅切口细小,且内窥镜还能传回高清3D视频为主刀医生创造钻进患者肚子的“即视感”。数字变焦功能使其能在不继续向患者体内推进的情况下,将手术视野放大10倍以上。什么解剖结构、组织分层,通通一清二楚,不在话下,看得清自然手术时更有准头。
普通的内窥镜手术不是也能让医生“身临其境”吗?还真不一样。首先,内窥镜剥夺了医生直接使用工具的直觉,却没给他们3D立体感;其次,腹腔镜技术难度远超预期,学习曲线很长。达芬奇在视觉上拓展医生视野的同时,3D影像弥补了2D平面影像欠缺的距离感。此外,身高近两米的达芬奇,“手艺”却精细得可以操作绣花针。之前网络上的一段达芬奇在玻璃瓶里为一颗葡萄缝合葡萄皮的视频表演就曾技惊四座。
与人的手臂一样,达芬奇机械臂也有肩、肘、腕三个关节。然而人体的肩、肘、腕,活动角度十分有限,当到达极限时动作就必须重新调整。而达芬奇的三个关节可以上下左右任意移动。最神奇的是达芬奇7自由度的“EndoWrist”手腕。虽然直径只有0.5-0.8厘米,但却比人手灵活得多。
人手上下翻转角度最多180度,而达芬奇的手腕可以自由旋转540度,能够在狭窄的人体胸腔、盆腔中自由弯曲、旋转,实施抓持、切割、缝合、打结等动作。
此外,达芬奇的手也不只一种形态。为了满足不同的手术操作需求,达芬奇“手”的品种丰富多样。超声刀、电凝刀、剪刀、镊子、钩子……用以开胸、缝合、止血……传统手术器械退居二线,成为替补。
虽然外科医生拥有高超的技术,但人毕竟是人,无法克服手臂的生理性震颤。达芬奇则滤除了这些不必要的颤动,用机器的稳定性使手术全程处于更安全、更精准的状态。在达芬奇的帮助下,手术追求的最高目标正逐步达成:切口变小、创伤减少、出血降低、血管损伤减轻。以前列腺为例,位于尿道口和膀胱接口处,部位很深,传统的开放手术需要很大的切口,但达芬奇只需要开几个1cm左右的小孔,出血量也更少,大大减少了患者的失血量及术后疼痛,住院时间也明显缩短,有利于术后的康复。事实上,在美国有超过90%的前列腺癌根治切除术都是由机器人辅助完成的。
更重要的是,机器人的帮助使传染病患者的手术也更容易、更安全。如艾滋病患者全身免疫功能低下,难以耐受大创口手术治疗,达芬奇完全克服了这一点。此外,传统手术过程中,医生需要做很多防护措施,既影响视线,也影响手感,在某些突发状况下,可能根本无法防范感染。而机器人手术过程完全处于患者腹腔内,基本能够防范病毒以血液和体液方式传播,保障医生安全。
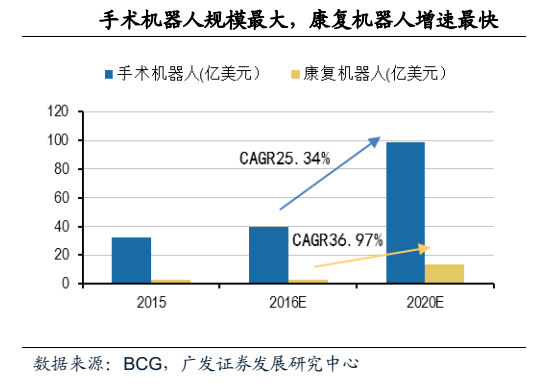
在康复机器人、手术机器人、仿生假肢和行为辅助机器人四个类别的医疗机器人中,手术机器人拥有最广阔的发展前景。手术机器人从80年底发展至今,2000年开始进入高速发展期,从市场结构看,手术机器人的市场份额是医疗机器人中最大的,大约占到了60%的医疗机器人份额。2016年预计手术机器人的市场销售金额为40亿美金,而2020年将达到约100亿美金。
使用达芬奇进行手术虽然有诸多好处,但是使用成本和手术价格成为其最大的劣势。由于其垄断优势,达芬奇在国内的第一批售价达到了惊人的2500万人民币,第二批售价1800万,2015年以后的采购价格可能还会略低。而该机器人在美国的售价只有1000万人民币/台,即使在韩国和日本的售价也比中国便宜。
除了机器本体价格高之外,耗材和维护费用也极其昂贵,达芬奇的钳子4~5万人民币/把,一次手术会用3把,使用10次之后就必须更换。再加上保险、维护等成本(150万人民币/年),达芬奇的手术费用分摊到患者身上就非常昂贵了。目前国内使用达芬奇的手术费用大约要额外加收3~4万元,这些费用无法用医保报销。而美国的手术费用大约是10万美金/次,虽然他们的耗材价格仅为国内的1/3,费用多为医生、护士的治疗服务费。
在美国,达芬奇机器人已经非常普及,在包括社区医院在内的全国5000多家医院里,达芬奇的装机量已经达到2200多台,只要是略具规模的医院,肯定会配备达芬奇。
除了美国本土市场外,另一个较大的市场是欧洲市场,也是达芬奇最先开拓的市场,在获得FDA的认证之前,达芬奇机器人就拿到了欧盟的CE认证,从而打开了欧洲市场,相对于美国市场来说,欧洲市场还有很大的发展潜力。
而在中国,情况则完全不同。无论达芬奇有多么神奇。
自2006年解放军301总医院引进第一台达芬奇手术机器人以来,达芬奇已经进入中国十年。然而由于达芬奇手术机器人属于一类医疗器械,国内任何医院引进该设备,均需卫计委直接批准,所以引入速度一直较慢。截至到目前,中国大陆目前的总装机量还不到60台,属于稀缺资源。
截至到去年6月,全球一共有3398台达芬奇机器人,亚洲大约有383台,美国大约有2295台左右。我国截至去年12月的装机量为42台,而2013年的时候仅有17台。根据当时的规划,未来三年至少将完成36台新装机,也就是说到2016年,我国大陆装机量至少达到53台。分布在全国各地的达芬奇手术机器人共完成手术11445例,历年总计完成手术22917例。

中国拥有13亿的人口,14年的看病就诊量是70亿次,相比美国,医疗机器人的需求空间非常大。在没有医保支持的前提下,自主研发无疑是让机器人手术价格下降最直接的手段。针对昂贵的设备购买价格和稀缺的购买指标,一些机构开始了手术机器人系统自主研发。经过几年的摸索和联合攻关,手术机器人国产化目标已越来越近。目前,国产手术机器人系统已处于研发的关键阶段,有望在近几年内面世。
Verb Surgical:Verb Surgical由谷歌母公司Alphabet生命科学部门Verily与制药巨头强生联手创办,旨在建立一个能够结合机器人、高级成像、机器学习、大数据和先进器材的平台,这样医生就能使用开放和侵入的程序。换句话说,它们的目标就是给予医生更多选择。医生能够根据需要在部分手术程序中使用Verb Surgical,或者全程使用它。谷歌和强生都非常关注大数据,一份金融分析师表示:从大数据中记录和分析程序能够真正让机器人手术程序得以复制,让它得到更大范围的应用。
Medtronic(美力敦):美敦力公司成立于1949年,为全球500强集团。美敦力于1957年制造出第一台便携式体外心脏起搏器,并于1960年制造出第一台可靠的可植入式心脏起搏系统。由此奠定了美敦力全球起搏技术领导者的地位。今天,美敦力已成为世界上占领导地位的医疗技术公司,为各种慢性疾病患者提供终身的解决方案。美力敦表示旨在2018年年中之前发布手术机器人,首先在印度得以运用。
TransEnterix:TransEnterix为加拿大手术机器人公司, 原本计划自其先前产品“蜘蛛”微创腹腔镜手术设备(SPIDER Surgical System)进一步研发手术机器人 SurgiBot,但遭到美国食品药物管理局(FDA)否决。后来转而专注于2015年以近亿美元购并意大利SOFAR公司所取得的ALF-X手术机器人。最近,TransEnterix向意大利米兰的一家医院销售了第一台产品。相比达芬奇外科手术系统,TransEnterix设备更便宜,并且有着达芬奇外科手术系统没有的功能:比如眼球追踪软件和触觉反馈。
Titan Medical:Titan Medical是一家多伦多公司,其正在开发Sport Surgical系统,将手术台、单切口摄像头、置和多关节器材结合,并将于2017年在美国发布。Titan机器人系统旨在将机器人手术精细化,让机器人能够进行微小部位的手术,包括胆囊切除术。
Medrobotics:Medrobotics的Flex Robotic系统提供喉部手术的机器人协助视觉系统,让手术更加灵活,操作更加便利。系统可以让机器人到达医生到达不了的地方,帮助喉部患病者解除病痛。
CRAS:海军总医院与北京航天航空大学联合开发的机器人系统CRAS是国内手术机器人系统的先行者,已完成第六代的研制和临床应用。该系统系统选用PUMA260、262机器人作为系统辅助操作的执行机构。第一代机器人于1997年5月首次应用于临床。第二代1999年研制成功,实现了无框架立体定向手术。第五代机器人除了前四代机器人的特点外,自动定位功能更加先进,实现了视觉自动定位,使手术误差更小,手术操作更加快捷安全。该系统能通过互联网实施远程操作手术。2005年12月12日,在北京与延安之间利用互联网成功进行了2例立体定向手术。虽然如此,CRAS手术机器人在扩大适用范围和实用性方面还是有许多问题需要解决。
微创腹腔外科手术机器人系统:由哈尔滨工业大学机器人研究所研制成功,并通过国家“863”计划专家组的验收。据哈工大机器人研究所的研发人员介绍,国产微创腹腔外科手术机器人系统具有我国自主知识产权,研究人员针对微创外科手术的多种术式,在手术机器人系统的机械设计、主从控制算法、三维(3D)腹腔镜与系统集成等关键技术上都进行了重要突破,并申请了多项国家发明专利。这个项目的突破被看做是打破了进口达芬奇手术机器人的技术垄断,将加快实现国产微创手术机器人辅助外科手术。
“妙手S”手术机器人:由天津大学、中南大学等单位联合研发,具备自主知识产权的“妙手S”机器人在中南大学湘雅三医院成功完成三台手术,宣告国内首例国产机器人手术已成功开展。“妙手S”是天津大学研发的具有自主知识产权的微创外科手术机器人系统,较国外同类产品有三点技术优势。第一是运用了微创手术器械多自由度丝传动解耦设计技术,解决了运动耦合问题,固定、防滑、防松,更有利于精度保持。第二是实现了从操作手的可重构布局原理与实现技术,使机器人的“胳膊”更轻,更适应手术的需要。第三是运用系统异体同构控制模型构建技术,解决了立体视觉环境下手-眼-器械运动的一致性。据了解,“妙手S”外科手术机器人系统将有望3年内投产。
NSRS:香港理工大学成功研发了全球首台内置马达外科手术专用机器人系统NSRS,这项研究借助了香港大学李嘉诚医学院的外科临床经验,并已成功应用于动物实验。该技术预计两年后进入临床试验,最快将于2019年推向市场。该系统内置马达驱动机械臂,可经由单一切口或自然腔道进入人体进行各类腹腔或盆腔手术。该系统运作精确,并能提供良好的力度反馈,为微创外科手术领域开创了新的一页。
由世界医疗机器人协会主办的“2016年世界医疗机器人大会”即将于10月29日~30日在中国深圳举行。这是首届全球性科研、临床、产业结合的医疗机器人领域的高峰会谈,届时将有近20多位各国院士出席大会,数十位全球知名医院院长、临床专家参与报告及讨论。来自瑞士技术科学院(SAWT)、英国皇家工程院、中国科学院、新加坡医学院、ROBO医疗机器人研究所等国内外知名机构的专家和学者,将在本次峰会上分享全球医疗机器人的应用趋势与研究方向,针对“科技变革医疗,健康引领未来”的主题展开专题研讨。

会议地点:中国·深圳·五洲宾馆
深圳福田区深南大道6001号
大会时间:2016年10月29日~30日
点击以下链接或扫描二维码报名,招商赞助请联系动脉网佩佩:(微信号:xiaopeiling185025)
http://m.grouplus.com/qs9Fee

相关阅读:
“2016世界医疗机器人大会”资讯抢先看
增长速度达到34.45%,医疗机器人行业未来看好
























{kind=link}